The Son-O-Mermaid: A Green Platform for the Blue Ocean
See the EarthScope-Oceans webpage for MERMAID's current whereabouts!
In the last few decades seismologists have mapped out elastic
wavespeeds of the Earth's interior with often perplexing if not always
uncontested detail. Earthquake sources used in seismic tomography lie
mostly on plate boundaries; receivers mostly on dry land. The uneven
coverage resulting from this fundamentally inadequate source-station
distribution leaves large volumes inside the Earth entirely unsampled.
Placing seismic stations on the ocean bottom is often touted as the
only solution. Bud Vincent from the
University of Rhode Island and I have proposed to develop and build a
low-cost geophysical instrument with the same long-term goal of
closing the coverage gap between continental and oceanic data
collection, but one with a much expanded versatility, wider range, and
longer life-span than MERMAID.
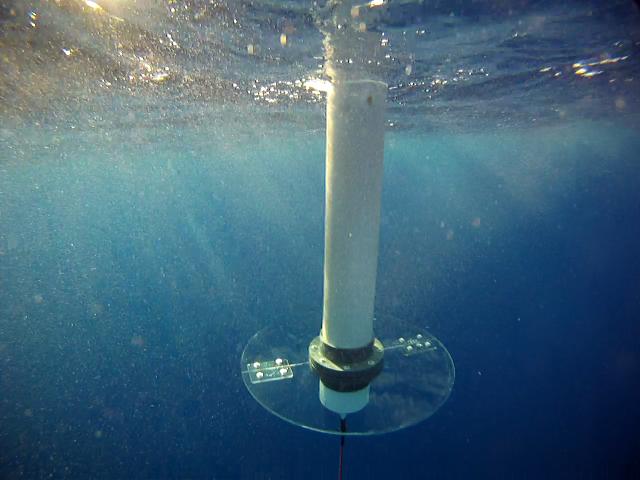
In a nutshell, Son-O-Mermaid is a fully autonomous, and
long-lived marine instrument. It is a freely drifting buoy that
derives energy from wave action, enough to power a vertical array of
hydrophones suspended from a compliant cable connected to a damping
plate below the waves, a full-ocean-depth echo sounder, GPS for
location and timing accuracy, an IRIDIUM satellite communication unit
for near real-time data transfer, and an on-board digitizing and
processing unit that, like its predecessor MERMAID,
uses sophisticated wavelet detection and discrimination
algorithms. The Son-O-Mermaid is to be deployed by untrained
personnel from ships of opportunity, which gives it an extra advantage
over conventional (e.g., ocean-bottom, tethered, moored) approaches.
The hurdles that need to be overcome and the problems solved in order
to make this instrument be of use for seismology, most specifically,
set a very high bar in terms of energy efficiency, instrument
accuracy, and longevity, and as a result, future generations of it
should be easily adapted to less demanding data collection exercises
--- be they physical, chemical, or biological.
Supported by
the A. H. Phillips Instrument Fund at Princeton University and by the
U. S. National Science Foundation
under grant EAR-1318416.
Live update 12 | 06/22/2016 | Frederik Simons
Too busy actually working to blog. Read about the progress
of last year here!
Even better, watch footage right here!
Live update 11 | 04/07/2015 | Frederik Simons
Almost there! There was no champagne, but we gave them
names. If all continues to go well these should go out to see on a BIOS-run BATS cruise at the end of May.

A note on naming rights. There are two classes of names. One is
up to us. We pick a name. It may or may not be in your honor, you
don't get to choose, request, or decline.
The second class is up
to you. You can buy naming rights for Son-O-Mermaid floats that
haven't been built yet (to raise funds to get them
built!).
They aren't cheap. Go ahead, make me an offer.
Live update 10 | 10/27/2014 | Frederik Simons
A bit behind on the blogging, but not on the works! Below
is a picture of the latest Son-O-Mermaid to come out of the Equipment
Development Laboratory (EDL) at the Graduate School of Oceanography of
the University of Rhode Island.

Live update 9 | 9/26/2014 | Hayden Radke
We have been super busy. But we're getting things together
for son-o-mermaid 2.0. Array and spar bouy are almost done. Now just a
bunch of wiring and some software and we're ready to rock.



Live update 8 | 11/30/2013 | Frederik Simons
After our encounter with Hurricane Sandy we regrouped and made some
design modifications. Remember, Son-O-Mermaid survived, but we lost a
piece of the cable and thus any recordings made. Luckily our first
experiment was conducted with a cheap replaceable surrogate
cable... but we couldn't afford to lose our nice and expensive
fiber-optic one if such a thing were to happen again. Bud and his team
at the Equipment Development Lab ultimately settles on an all-copper
solution. The faired and terminated cable was delivered right before
Thanksgiving. Thanks! Here are some pictures.


Live update 7 | 12/10/2012 | Bud Vincent
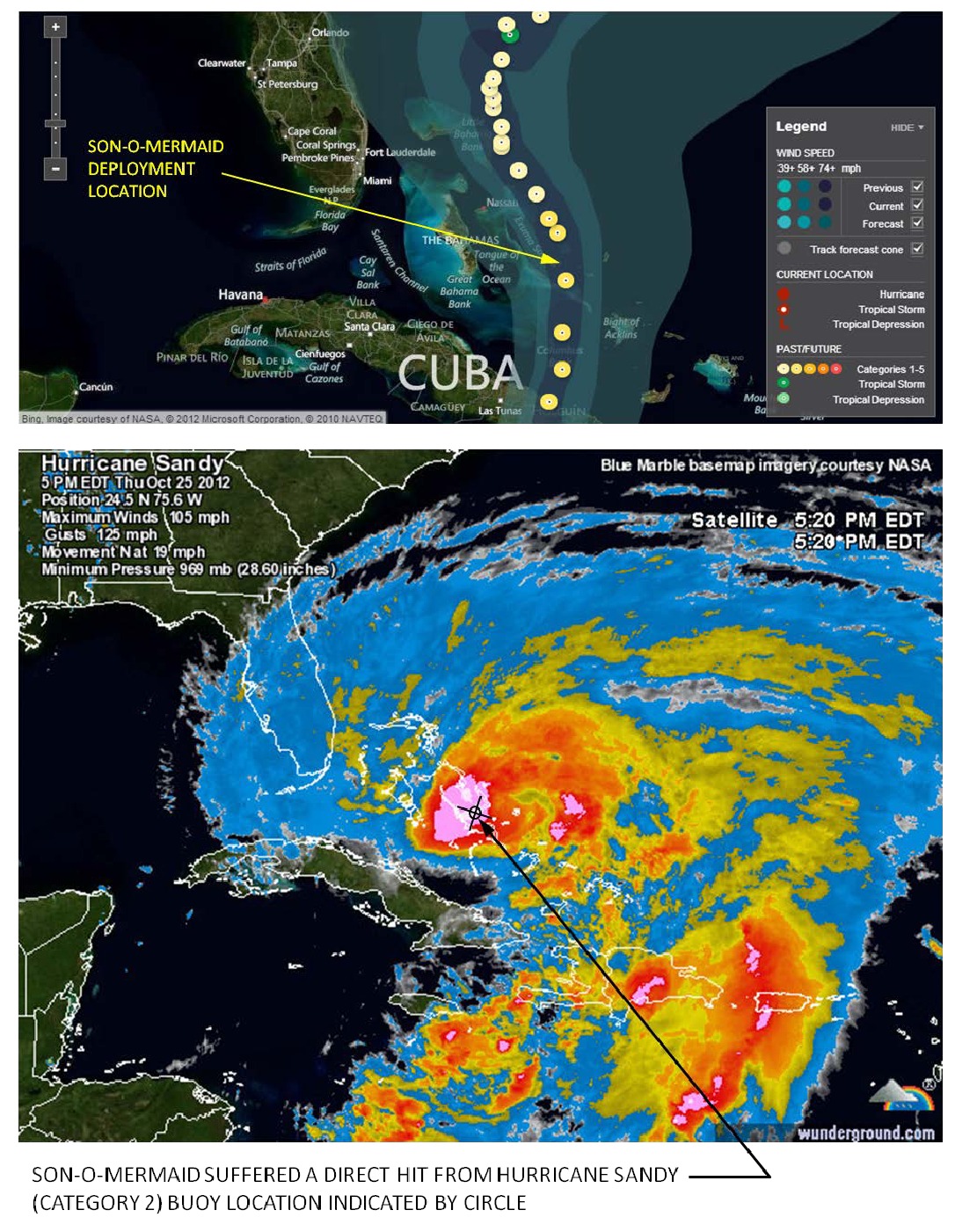
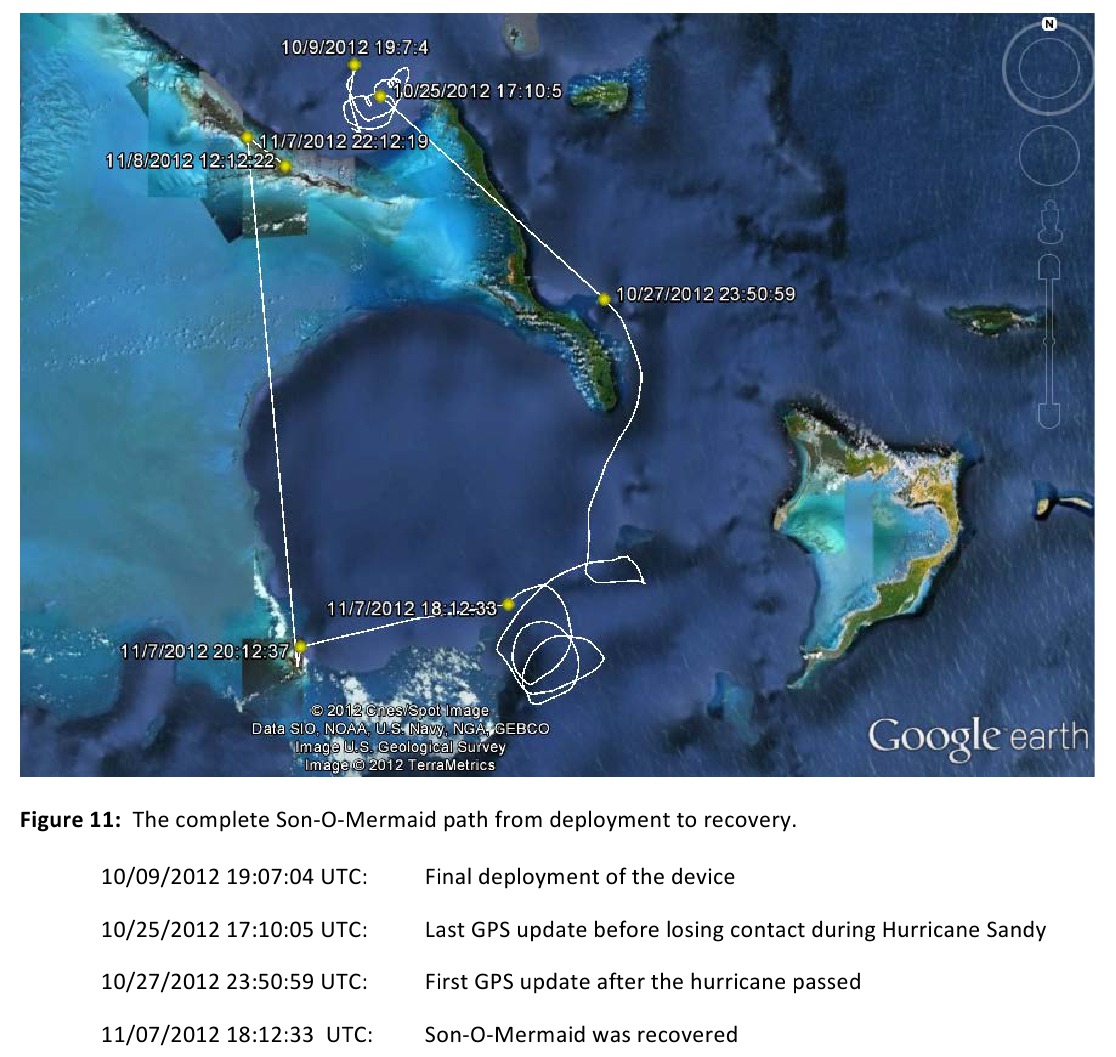
Well... just barely, that is. Son-O-Mermaid was deployed
on October 9th, 2012 at 19:07:04 UTC. During the deployment period, it
was hit by three storms: the first two were tropical storms and the
third was Hurricane Sandy. Hurricane Sandy's path cut directly
through the deployment site of Son-O-Mermaid. At this
time, the Hurricane was officially a category 2 and registered wind
speeds as high as 105 mph. We stopped getting position updates on
October 25th, 2012 at 17:10:05 UTC and did not receive any updates
from the device until October 27th at 23:50:59 UTC. When we received
the first update after the hurricane, Son-O-Mermaid was approximately
47NM southeast of its last recorded position. The device remained
deployed for an additional 11 days. On November 7th, our contact on
Great Exuma flew to Ragged Island and hired a local to take him out on
a boat to pick up Son-O-Mermaid. The surface buoy was successfully
located but, the recording system and hydrophone array was detached
from the end of the line. In the end, all that was left of
Son-O-Mermaid is the surface buoy with the Iridium unit and about two
thousand feet of line. This was brought back to Great Exuma.
Oh. And did I mention sharks.
The recording system was not recovered and therefore, the hydrophone
data recorded during the final deployment were lost. Fortunately, on
the second day of deployment when the instrument was checked up on,
about 24 hours of acoustic data was copied onto a laptop hard drive.
Live update 6 | 10/29/2012 | Son-O-Mermaid
I met my first shark. Then I survived hurricane Sandy! More to
come. All did not end well.


Live update 5 | 10/11/2012 | Bud Vincent
Some pictures from the maiden voyage first deployment
(Phase I testing), which was, until further notice, a resounding
success. The experiment is still going on!


Live update 4 | 09/21/2012 | Frederik Simons
We are getting ready for Phase I testing of the
prototype! The prototype system is ready to go. It contains all but
the actual communications cable and the wave-generator. Phase I of the
test will be for a 30-day deployment to test the mechanical integrity
and stability of the design (using a surrogate cable), and the noise
floor of accelerometers and the hydrophone arrays. The recording
package hangs at the end of the surrogate cable; in the final design
this will be moved to the surface buoy once the communication/power
cable is finished. Of course the goal is to detect some actual
earthquakes in this time period! The test will be conducted in the
Tongue of the Ocean, Bahamas... We received a very official looking permit for this test. Phase II
testing (like Phase I but including the fiber-optic cable, remote
communications control, GPS and Iridium teleconnections) can happen
soon thereafter. And if that all goes well, Phase III testing
(like Phase II but with the wave-energy scavenging module on it also,
for a total target production price of $10000) shouldn't be that far
off. Fail-safe and super-low cost scenario (target: $5000) is to build
the final unit without the wave generator but with conventional
batteries... but why build a Civic when you can get a Prius? Let's
think big and be job-creators. Below are some pictures from the
ballasting tests.


Live update 3 | 09/10/2012 | Bud Vincent
The custom cable that we had made (kevlar for strength, 2
copper conductors for power, 2 fibers for communications) is
"finished", but needs to be "finished"... in a process called
"termination" by "overmoulding" by a liquid polymer that hardens for
strength and watertight integrity. Making the cable took about 9 weeks
after final design approval. The company that made the cable is Falmat in San Marcos, CA. The
termination is in the hands of Teledyne Impulse. This is
an expensive, one-of-a-kind piece of equipment... costing about $8000
to make and loads more to finish. Will let you know when it makes its
way from California to Rhode Island.
Live update 2 | 06/15/2012 | Bud Vincent
Things are proceeding well with Son-O-Mermaid. We have conducted bench top
evaluation and power consumption testing of your Printed Circuit Board
assemblies, and we will be conducting a test of the hydrophone array and
data recording sub-system next week in Narragansett Bay (of course not to
2000 feet!).
The surface GPS-Iridium unit underwent a great test this past week during a
sea test I just did offshore in Hawaii. It worked flawlessly and I can send
you a Google Earth KML file if you would like. (You can also see the
messages at the Son-O-Mermaid Gmail account).
Live update 1 | 03/17/2012 | Bud Vincent
The hydrophone array is built and was installed in the acoustic tank
for its first functional test. I have attached a couple MATLAB data
files. The first data file is "HammerTest1_3CH.mat". There are four
channels of acoustic data stored in a variable Data (matrix of size
250E3 x 4). The first 3 channels are SonOMermaid. The 4th is another
hydrophone (ITC-1089D). The sound source was very light taps on the
concrete wall of the tank with a hammer. The second file is
"weightDrop1.mat". This has two channels of data (the first from
mermaid the second from ITC-1089D). The source of the data is
dropping a lead weight on the concrete floor a few meters away from
the tank. You will notice that everything is working correctly but
the noise floor is fairly high (still much better on mermaid than the
1089D hydrophone). This is due to a few reasons: we did not use
batteries for the hydrophone pre-amp power source, did not use the
embedded data acquisition system, and had the hydrophone signals
brought out of the tank on long cables back to the test bench. All of
these factors create a higher noise floor than we should see in the
final configuration. Our next test is of course to repeat this with
the at sea configuration of battery power and embedded data
acquisition. As soon as we do this I will send some more data.
Last modified: Sat Jun 30 22:57:49 EDT 2018